Remotehead 1.0


Überblick
Auf einen Prototypen muss auch eine „finale“ Version folgen. Im Folgenden wird der Weg vom Prototypen zum fertigen Remotehead gezeigt.
Technische Daten Überblick
- Preis: ~ 50€
- Fernsteuerbar
- Kameras: DSLR/M + Aufbau, kleine/mittlere Camcorder
Werkzeugliste
- (Stand-)Bohrmaschiene
- Metallbohrer in versch. Größen
- Metallsäge
- Metallfeilen
- Schraubenzieher
- Maulschlüssel
- Kegelbohrer
- Lötkolben
- Hammer
- Körner
- Lochsäge 40mm
Materialliste
- Prototypen des Remoteheads
- Alu Flachstange 50x1000x5
- Alu Flachstange 60x1000x5
- Alu Profil 50x25x2
- Alu Profil 25x25x2
- M12 Gewindestange
- Alu Rohr 16mm AD
- Plastikplatte
- M12 Muttern
- Kabel
- Div M3, M4, M6 Schrauben + Muttern
- Heißkleber
- Fernbedienung Modelcraft (FS-T6)
- 2x Modelcraft Getriebemotor, Untersetzung 1:600
- 2x Regler Carson – Viper Micro Marine, 6 – 12V
- 2x Zahnrad 40 Zähne (Modul 1)
- 2x Zahnrad 20 Zähne (Modul 1
- Quetschkontakte
- Kabel (Litze 0,75mm²)
- Antenne (für Koffer)
- Stecker (z.b. Molex Stecker)
- 12V Netzteil
Aufbau Video
Pläne und Aufzeichnungen


Leider gibts es zu dem Remotehead nur diese beiden Pläne. Das wichtigste ist aber dargestellt.
Projektbeschreibung
Als erstes wollen wir den Stahlrahmen durch einen Rahmen aus Aluminiumprofien ersetzen, da diese deutlich leichter und stabiler sind. Dafür müssen wir aus dem 50x25x2 Profil entsprechende Stücke sägen.

Die Profile werden später von innenliegenden Winkeln zusammengehalten. Diese können wir aus der Alu Flachstange (60x1000x5) herausschneiden. Dabei sollten diese Winkel so geschniten werden, dass diese ganz genau und mit so wenig Spiel wie möglich in die profile passen. Je weniger Spiel die Winkel haben, desdo stabiler ist später der Rahmen.
Die Winkel werden dann später mit M6 Schrauben verschraubt. Dafür müssen auf jede Seite jeweils zwei Löcher in die Profile gebohrt werden. Passend dazu müssen in die Winkel M6 Gewinde gebohrt werden.



Nun müssen wir die Aufhängungen auf den neuen Rahmen übertragen. Dafür muss auf das obere Element wieder die Achse mit dem Zahnrad angeschraubt werden, dies geschieht analog zu dem Prototypen.


Nun müssen wir an einem seitlichen Element den Antrieb für die vertikale Bewegung anbringen. Der Aufbau ist tendenziell der selbe wie beim Prototypen nur dadurch, dass wir jetzt Profile verwenden müssen wir vorher an der Außenseite ein passendes Loch für den Motor bohren durch den wir diesen stecken können. Dieser wird dann an der Innenseite verschraubt.
Auf der anderen Seite müssen ebenfalls noch Bohrungen für die Achse mit Kugellagern gemacht werden


Bei dem Einsatz tauschen wir noch das Aluminiumblech durch eine 5mm starke Aluminium Flachstange damit dieser stabiler wird. Anschließend kann das ganze verschraubt werden.

Nun müssen wir den Halter für den Remotehead vorbereiten. Dafür verwenden wir auch ein Aluprofil wie wir es bei dem Rahmen verwendet haben. In dieses Profil müssen die selben Bohrungen gemacht werden, wie bei der Antriebsseite der vertikalen Bewegung.

Diesen Halter können wir dann in die alte Haltekonstruktion einbauen.

Am Ende muss der Remotehead nun neu verkabelt werden
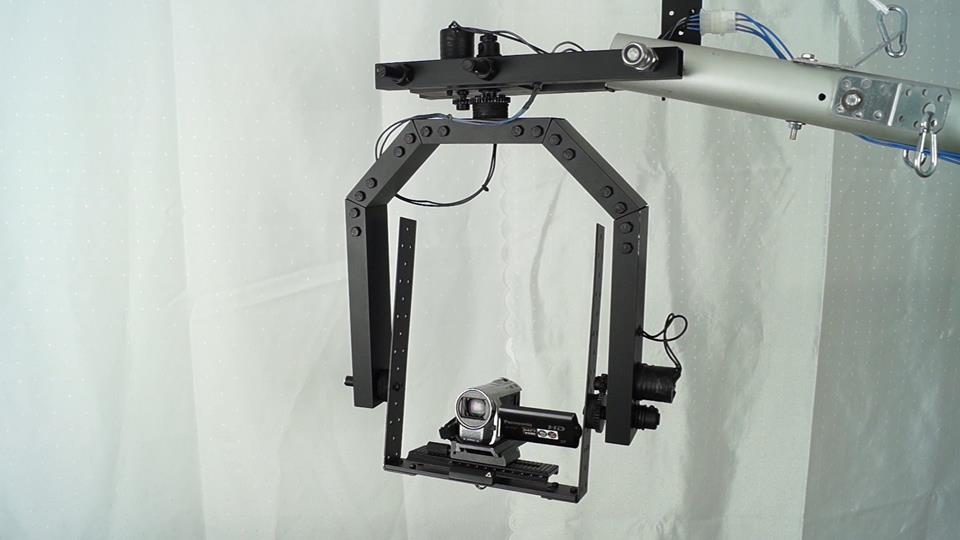
Anschließend haben wir den ganzen Remotehead noch schwarz lackiert um spätere Reflexionen zu vermeiden.
